I was in need of a cheap USB->DMX interface and decided to build my own. Searching the web I fould quite a lot DIY solutions. But most of them were unsuitable for me.
My design features:
- low cost (about 10€)
- open source: schematic and board are licensed CC-BY-NC-SA, the firmware is GPL (except microchip files)
- a real rs485 transceiver
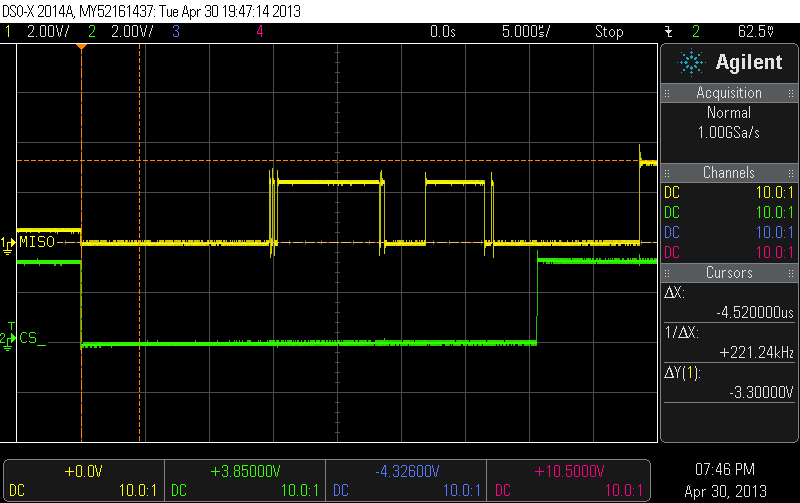
- signal-generation by the Microcontroller (no bit-banging like the ftdi-dmx interfaces)
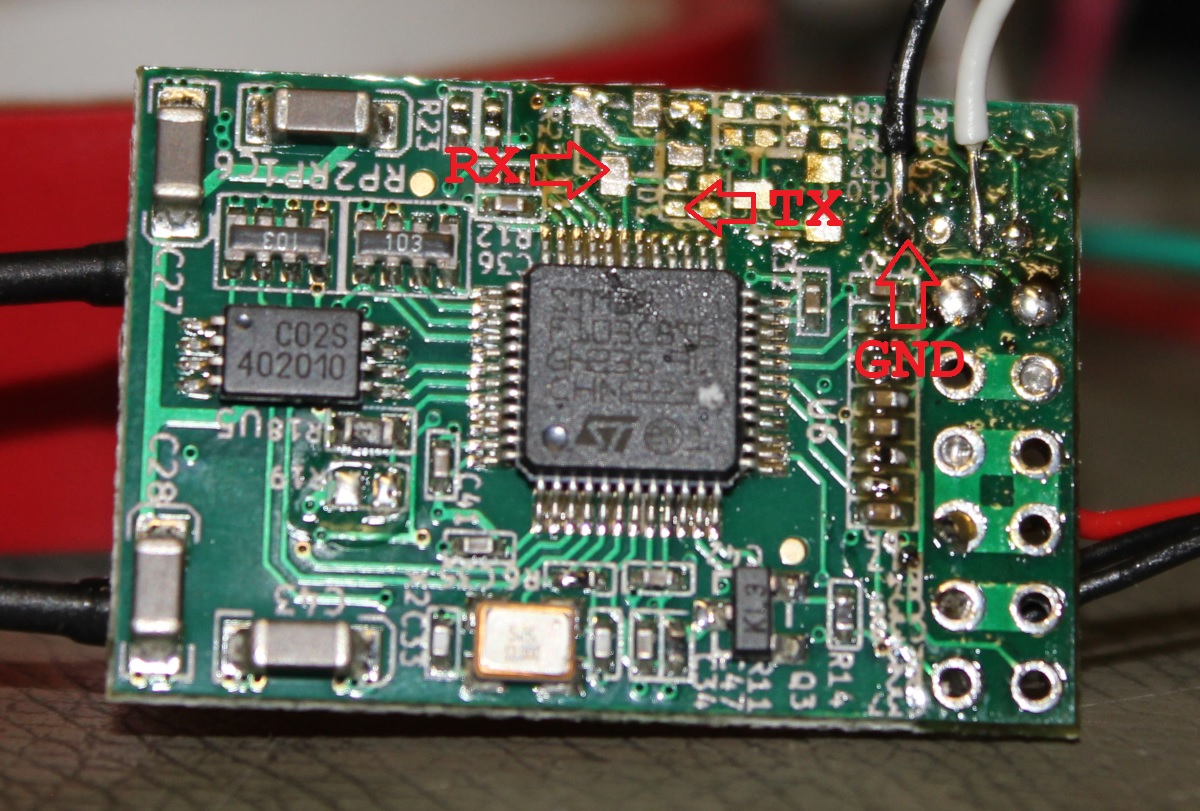
- bootloader to update the firmware (thats what the switch is for – rescue mode)
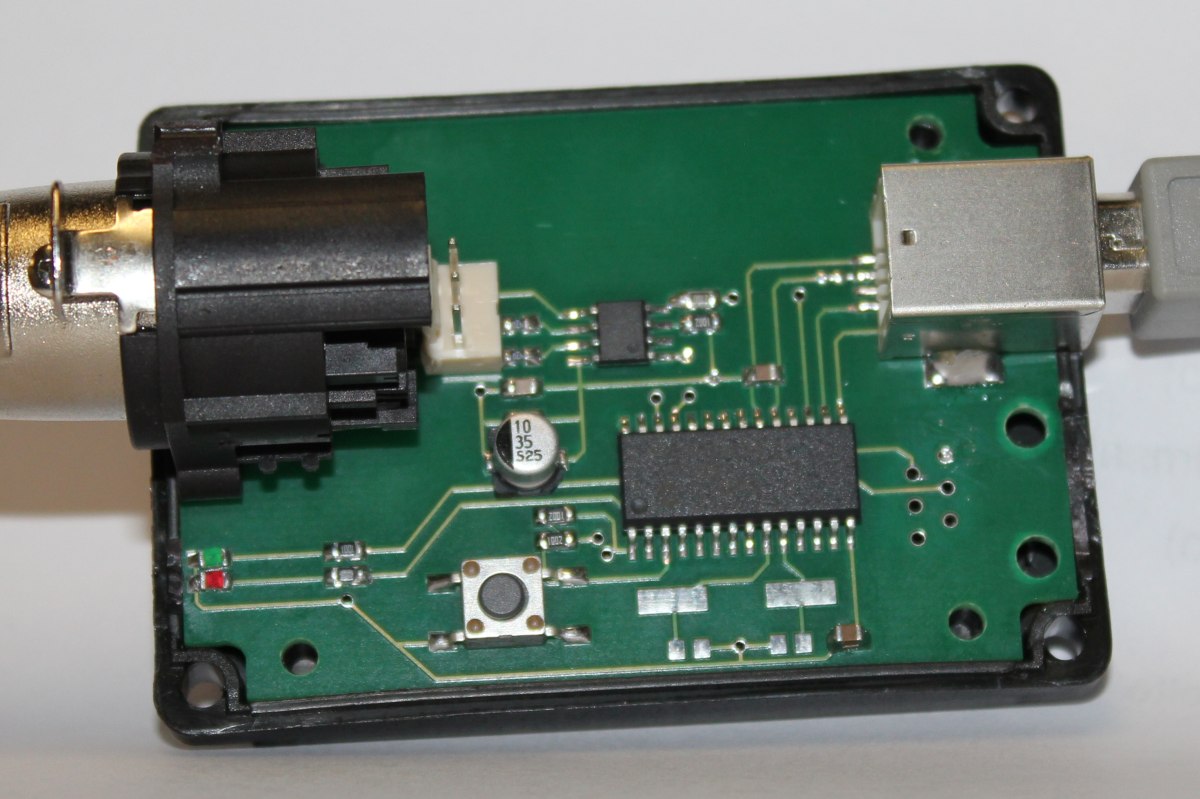
- fits into a ‘G027’ case (kemo-electronic)
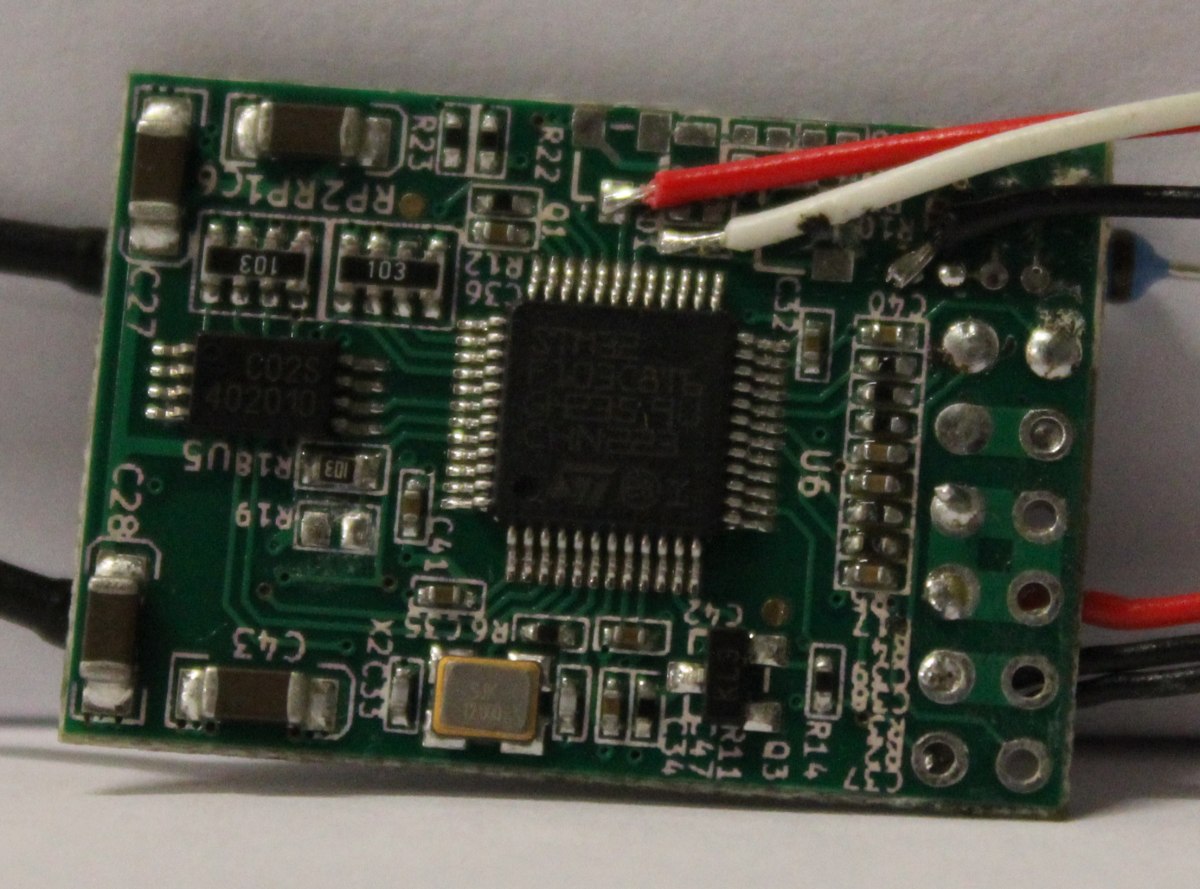
If you take a look at the schematic you will see that the processor used is a 18F2550. But its possible and recommended to use the 18F24K50 which is cheaper and doesnt require a crystal oszillator. This is due to the fact that i made the initial design with the older controller (which i had at hand during the time).
On the software side there is a patch for ola. You will notice that reworked the ‘opendmx’ driver (i failed adding a new driver/directory to the build system).
There is no need to patch ola anymore. The karate-plugin is now in the mainline-tree.
Please respect the CC-BY-NC-SA licence when downloading and using it 🙂